Back to undergraduate research page
Fractional Gompertz models
This work led to a joint publication with a student here!
The Gompertz dynamic equation (investigated here) is
$$y^{\Delta} = (\ominus r)yL_y(t,t_0),$$
where $L_y$ denotes the Bohner logarithm. In the case of the time scale $\mathbb{T}=\{0,1,2,\ldots\}$, the Gompertz dynamic equation becomes the difference equation
$$\Delta y = \left(-\dfrac{r}{1+r}\right)yL_y(t,t_0), \quad L_y(t,t_0)=\displaystyle\sum_{k=t_0}^{t-1} \dfrac{y(k+1)-y(k)}{y(k)}.$$
An analogous $\nabla$ equation can be defined as
$$\nabla y = \left(\boxminus r\right)yL_y(t,t_0), \quad L_y(t,t_0)=\displaystyle\sum_{k=t_0+1}^t \dfrac{y(k)-y(k-1)}{y(k)}.$$
In this article published with an undergraduate, we defined three discrete fractional logarithms:
$$L_{y,\nu}(t,t_0)=\left( \nabla_{t_0}^{-\nu} \dfrac{y^{\nabla}}{y}\right)(t), \quad t\in\mathbb{N}_{t_0+1},$$
$$\ell_{y,\nu}(t,t_0)=\displaystyle\int_{t_0}^t \dfrac{\nabla_{t_0}^{\nu} y(\tau)}{y(\tau)} \nabla \tau, \quad t \in \mathbb{N}_{t_0+1},$$
and
$$\Lambda_{y,\nu}(t,t_0)=\left( \nabla_{t_0}^{-\nu}\dfrac{\nabla_{t_0}^{\nu} y}{y} \right)(t), \quad t \in \mathbb{N}_{t_0+1}.$$
With these three logarithms, we studied three Riemann-Liouville fractional difference initial value problems:
$$\nabla y = (\boxminus r)y(a+L_{y,\nu}), \quad y(t_0)=y_0, \hspace{35pt} (*)$$
$$\nabla_{t_0}^{\nu} y(t) = (\boxminus r)y(a+\ell_{y,\nu}), \quad y(t_0+1)=y_0,$$
and
$$\nabla_{t_0}^{\nu} y(t)=(\boxminus r)y(a+\Lambda_{y,\nu}), \quad y(t_0+1)=y_0.$$
We found a closed form solution of $(*)$ in terms of the (Riemann-Liouville) discrete Mittag-Leffler function as follows: if $0<\nu<1$, $r<\dfrac{1}{2}$ and for $t \in \mathbb{N}_0$, and $\displaystyle\sum_{k=t_0+1}^t E_{\boxminus r,\nu,\nu-1}(t-k+1+t_0,t_0)H_{-\nu}(k,t_0) \neq -1 - \dfrac{1-r}{ar}$, then (*) has the unique solution $y(t)=y_0 E_p(t,t_0)$, where $p(t)=(\boxminus r)a+(\boxminus r)\Big( E_{\boxminus r,\nu,\nu-1}(\cdot,t_0) * aH_{-\nu}(\cdot,t_0)\Big)(t)$. Closed-form solutions of a wider range of parameters or the other two models were not achieved.
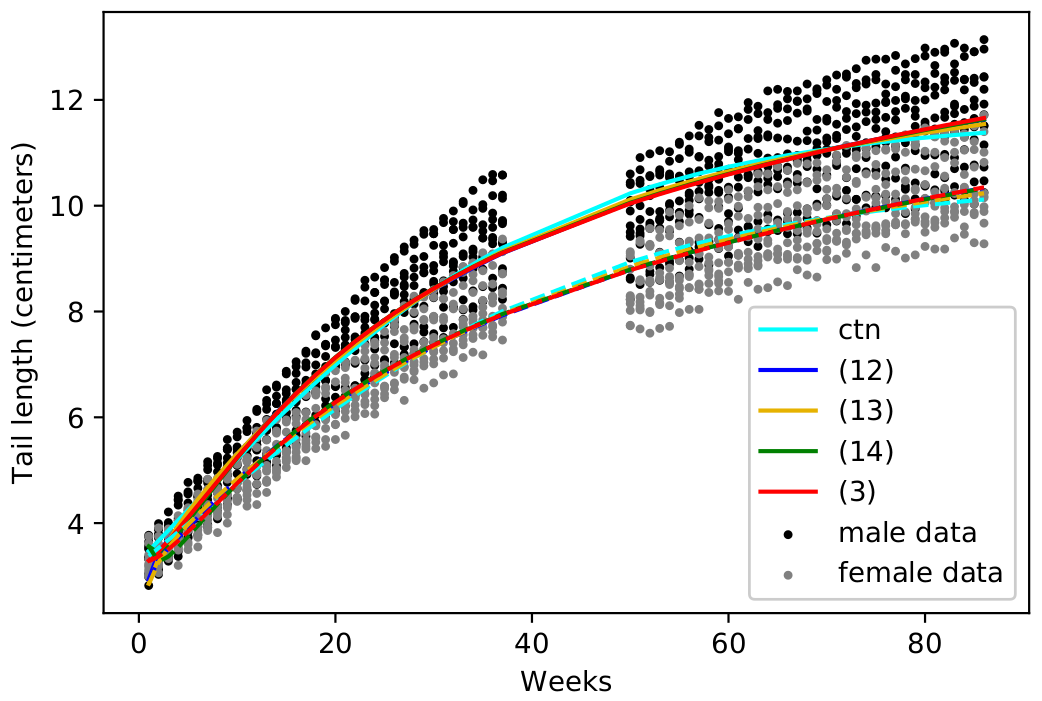
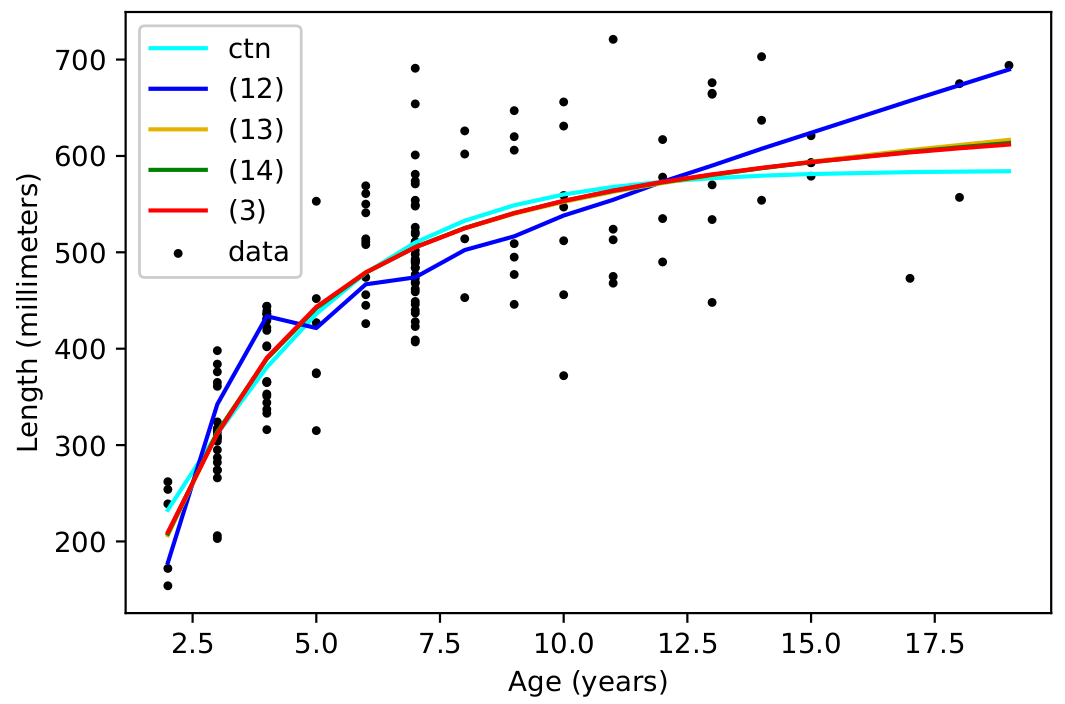
The three models were fit to data and compared to pre-existing models. It was shown that they fit some data equally well to the pre-existing models (including the long-existing continuous model for $\mathbb{T}=\mathbb{R}$). The first image is data collected measuring tail length of male and females of a species of skinks; the second image is fit to data comparing the age to the length of certain catfish caught in Cheat Lake, West Virginia:
 Python source code for solutions to these equations can be found here.
Python source code for solutions to these equations can be found here.
Some potential projects for further research
- Change the time scale from $\mathbb{T}=\{0,1,2,\ldots\}$ to another time scale. This will cause the coefficient $\ominus r$ to be a function of time instead of being a constant.
- Investigate qualitative properties of the existing discrete models. For instance, characterizing when solutions are stable or oscillatory.
- Repeat the analysis in the discrete case for other fractional differences such as the Caputo difference.